
ТЯГОВЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКАБесколлекторные электрические двигатели переменного тока получили широкое применение в самых различных отраслях техники благодаря простоте устройства. Электродвигатели переменного тока, как и двигатели постоянного тока, представляют собой электрические машины, предназначенные для преобразования электрической энергии в механическую. Однако в способах осуществления этого принципа в электродвигателях двух типов имеются существенные различия.
Рис. 176. Схема простейшего электродвигателя переменного тока Оси вращения магнитного потока и рамки должны совпадать. Магнитный поток, пересекая рабочие стороны рамки, будет индуктировать в них э. д. с, как в любом электрическом генераторе. Согласованная э. д. с. в рабочих сторонах приведет к возникновению электрического тока в замкнутой рамке. Этот ток взаимодействует с магнитным полем. Образуется пара сил, которая создает вращающий момент, заставляющий рамку поворачиваться вслед за магнитным полем. Таким образом, в электродвигателе переменного тока вращающийся магнитный поток полюсов статора индуктирует в замкнутых рамках, образующих витки обмотки ротора, электрический ток. Здесь ротор приводится во вращение теми же силами взаимодействия магнитного поля и тока, как и якорь в двигателях постоянного тока, но отпадает необходимость в подводе тока от внешнего источника к вращающейся обмотке, а значит, и надобность в коллекторе. Частота вращения ротора такого электродвигателя окажется несколько меньше частоты вращения магнитного поля. Только при этом условии магнитные силовые линии будут пересекать проводники, образующие витки, и, следовательно, в витках возникнет ток, взаимодействующий с магнитным полем. Если частоты вращения поля и витков будут одинаковыми, то магнитное поле не будет пересекать проводников, исчезнет ток в витках, являющийся причиной вращения ротора. Поэтому ротор и магнитное поле вращаются не с одинаковой частотой, или, как говорят, вращаются несинхронно (асинхронно). Электрические двигатели, работающие по рассмотренному принципу, получили название асинхронных. Само слово «асинхронный» образовано с помощью приставки «а», используемой в иностранных, преимущественно греческого происхождения, словах, выражающей отрицание или отсутствие какого-либо качества. В асинхронном двигателе отсутствует качество синхронного вращения магнитного поля и ротора.
Рис. 177. Схема трехфазного асинхронного электродвигателя Внутри статора располагается ротор с обмоткой. Подключим катушки статора к источнику трехфазного электрического тока, как показано на рис. 178, и проследим процессы изменения тока I в катушках и создаваемого ими магнитного потока в зависимости от времени t, В положении а ток в I фазе равен нулю, во II фазе он имеет отрицательное значение, а в III — положительное. Воспользовавшись правилом правой руки для определения направления, создаваемого током магнитного потока, можно установить, что внутренний конец сердечника второй катушки 2 будет северным полюсом, а внутренний конец сердечника третьей катушки 3 окажется южным полюсом. Суммарный магнитный поток внутри электродвигателя направлен от северного полюса катушки 2 к южному полюсу катушки 3. Дальнейшее изменение тока в фазах постепенно меняет величину магнитного потока катушек. В положении б ток во II фазе равен нулю. В III фазе ток
Рис. 178. Схема получения вращающегося магнитного поля в трехфазном электродвигателе В положении в за счет дальнейшего изменения тока в катушках первый полюс становится северным, второй южным, в катушке третьего полюса ток отсутствует. Суммарный магнитный поток двигателя повернулся еще на угол 120°. И наконец, в положении г токи в катушках по величине и направлению становятся такими же, как и в положении а. Магнитный поток еще повернулся на 120°. Таким образом, за один период изменения переменного тока магнитный поток сделал полный оборот. Почти на один оборот (с учетом скольжения) повернется и ротор двигателя, увлекаемый магнитным потоком. Из рис. 178 можно видеть, что три полюсных обмотки асинхронного двигателя трехфазного тока создают двухполюсное магнитное поле (поле имеет один северный и один южный полюсы). В этом случае частота вращения магнитного поля равна частоте тока.
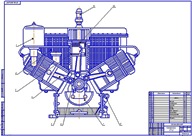
Рис. 179. Статор трехфазного асинхронного двигателя Магнитопровод (сердечник) статора набирается из тонких штампованных листов электротехнической стали для уменьшения потерь на вихревые токи. Сердечник на внутренней поверхности имеет пазы, в которые укладываются изолированные проводники обмотки статора в виде отдельных катушек для каждой фазы. Собранный сердечник с обмоткой устанавливают в станине электродвигателя. Все начала и концы катушек обмотки статора выводят наружу для соединения с внешней цепью и обеспечения реверсирования двигателя.
Рис. 180. Схема обмотки короткозамкнутогго ротора "беличье колесо" Фазный ротор снабжен обмоткой из изолированного провода, ее концы присоединяют к контактным кольцам ротора. Через щеточный аппарат обмотка замыкается на пусковой реостат. Пусковой реостат увеличивает сопротивление обмотки ротора. При пуске двигателя с помощью пускового реостата резко снижается сила пускового тока. Пусковой реостат позволяет осуществить плавное регулирование вращения ротора в определенных пределах.
Рис. 181. Структурная схема машинного преобразователя частоты переменного тока для тепловозов В этом случае дизель-генератор Д тепловоза работает с постоянной частотой вращения. Генератор Г вырабатывает постоянный ток, который приводит в действие электрический двигатель ЭД дополнительной двигатель-генераторной установки. Тяговый синхронный генератор СГ переменного тока этой установки вырабатывает электрическую энергию для питания тяговых электродвигателей 1 — 3. Регулируя частоту вращения двигателя дополнительной установки можно изменять частоту вырабатываемого тяговым генератором тока в необходимых пределах для обеспечения полного использования мощности дизеля при изменении скорости движения локомотива и частоты вращения якорей тяговых двигателей. Однако легко видеть, что в этом случае на тепловозе потребуется установить дополнительную двигатель-генераторную установку, имеющую большую массу, трудоемкую в ремонте, и применить специальную систему ее автоматического регулирования. Поэтому разработанные проекты тепловозов с такой системой регулирования частоты переменного тока, используемого для асинхронных тяговых двигателей, не были практически реализованы. В начало статьи |

Чертежи локомотивов и вагонов в КОМПАСЕ
ЧТО ТАКОЕ ТЕПЛОВОЗ
К чему стремятся конструкторы?
Почему усложняется связь дизеля с колесами тепловоза
Как связать дизель с колесами тепловоза
Понятие об экипаже
Как расположить оборудование?
ПРИНЦИПЫ РАБОТЫ ДИЗЕЛЕЙ
Условия возникновения процесса горения
Схемы дизелей
Степень сжатия
Рабочие циклы дизелей
Продувка цилиндров двухтактного дизеля
Фазы газораспределения
Индикаторная диаграмма
Мощность дизеля
Наддув. Турбокомпрессоры. КПД дизеля
УСТРОЙСТВО ДИЗЕЛЯ
Блок дизеля, цилиндровые втулки и поршни
Шатунно-кривошипный механизм
Крутильные колебания. Антивибраторы
Механизм газораспределения
Топливная система и аппаратура
Автоматическое регулирование
Охлаждающие устройства дизеля
Очистка масла, топлива и воздуха
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Виды электрических передач
Принцип действия генератора постоянного тока
Устройство тягового генератора постоянного тока
Тяговый генератор переменного тока
Двухмашинный агрегат и тахогенераторы
Тяговые электродвигатели постоянного тока
Как расширить диапазон скорости
Тяговые двигатели переменного тока
Аккумуляторные батареи
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ
Контакторы
Контроллер машиниста
Реверсор
Кнопочный выключатель
Реле
Реле боксования
Реле давления масла, температурное реле и реле времени
Регулятор напряжения
Трансформаторы
Магнитный усилитель
Трансформаторы постоянного напряжения и тока
Полупроводниковые диоды и стабилитроны
Выпрямление переменного тока
Транзисторы и тиристоры
Полупроводниковый регулятор напряжения
ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
Основные группы электрических цепей тепловоза
Схема силовой цепи тепловоза
Цепи возбуждения тягового генератора и возбудителя
Получение жестких характеристик тягового генератора
Цепи возбуждения возбудителя в системах машинного регулирования мощности генератора
Цепи управления тепловозом и защиты оборудования
Цепи освещения
ЭКИПАЖ И КУЗОВ
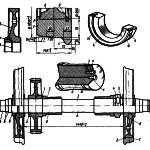
Колесная пара
Как установить и соединить тяговый электродвигатель с колесной парой?
Буксы и подшипники
Рессорное подвешивание
Тележка и ее рама
Главная рама и кузов тепловоза
Опоры кузова. Возвращающие устройства
![]()