
КАКОМУ ДВИГАТЕЛЮ ОТДАТЬ ПРЕДПОЧТЕНИЕ?Наибольшее распространение в промышленности получили электрические двигатели двух видов: переменного тока — трехфазные асинхронные и постоянного тока — коллекторные с различными способами возбуждения. Какой же из них лучше использовать на электровозе?
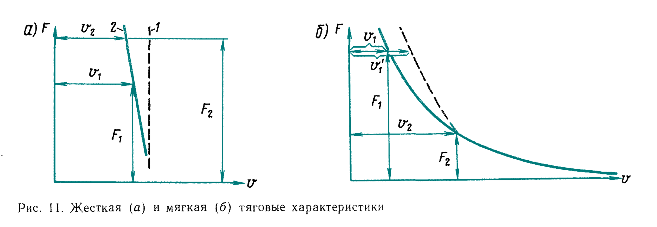
Изображенные на рис. 11, (а) тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями и равная произведению силы тяги на скорость, например, на крутых подъемах, возрастает пропорционально увеличению силы тяги (произведение V1F1 значительно меньше V2F2, см. рис. 11, а). Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 11, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности (V1F1= V2F2). Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла. Трехфазные асинхронные двигатели самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть. Поэтому асинхронные двигатели до недавнего времени почти не применяли на электровозах.
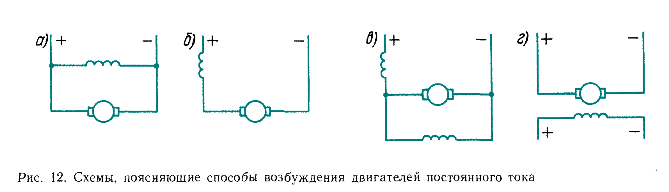
Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 12, а) и последовательно с ней (рис. 12, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 12, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения; если потоки вычитаются, то имеем двигатели встречного возбуждения. Применяют и независимое возбуждение: обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 12, г).
где I — ток электродвигателя; rд — эквивалентное сопротивление обмоток двигателя.
где С1 — коэффициент, учитывающий конструктивные особенности двигателя (число пар полюсов, число активных проводников обмотки якоря и число параллельных ветвей обмотки якоря) и размерности величин, входящих в формулу; Ф — магнитный поток; n — частота вращения якоря двигателя. Тогда
откуда получаем:
где Cм — коэффициент, который учитывает размерность величин, входящих в формулу, число проводников обмотки якоря и другие параметры двигателя.
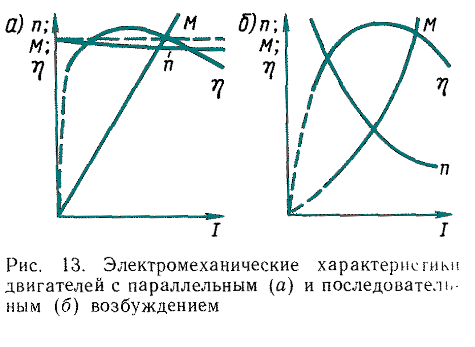
Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 12, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря, как видно из формулы (4), обратно пропорциональна потоку и при увеличении тока якоря I, а значит и магнитного потока Ф, резко уменьшается (рис. 13, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.
Поскольку в теории тяги пользуются размерностью частоты вращения якоря тягового электродвигателя, выраженной в об/мин, а скорость движения поезда измеряют в км/ч, то формула (6) с учетом коэффициента согласования этих размерностей принимает вид
Зная вращающий момент на валу двигателя, а также потери при передаче момента от вала тягового двигателя к колесной паре, которые характеризуют к. п. д. передачи можно получить и силу тяги, развиваемую одной, а затем и всеми колесными парами электровоза:
где Nкд — число тяговых двигателей локомотива или движущих колесных пар. В начало статьи |







Чертежи локомотивов и вагонов в КОМПАСе
ЭЛЕКТРОВОЗ: УСТРОЙСТВО И РАБОТА
Первое знакомство с электровозом
Переменный или постоянный ток
Электроснабжение железных дорог
Немного из теории движения поезда
История электрификации железных дорог
Понятия об электрических схемах
ТЯГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Какому двигателю отдать предпочтение?
Устройство тягового двигателя
Коммутация. Реакция якоря. Мощность
АППАРАТЫ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА
Токоприемники
Разъединители и быстродействующие выключатели
Пуск тяговых двигателей. Пусковые реостаты
Индивидуальные контакторы
Перегруппировка двигателей. Групповые переключатели
Режим ослабленного возбуждения. Индуктивные шунты
Реверсоры
Электрическое торможение
Принципиальные схемы силовых цепей
АППАРАТЫ И СИЛОВОЙ ЦЕПИ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА
Токоприемники. Главные выключатели
Тяговые трансфор-маторы.Регулирование напряжения
Главный контроллер
Полупроводниковые приборы и выпря-мительные установки
Преобразовательные установки для режима электрического торможения
Принципиальные схемы силовых цепей
ВСПОМОГАТЕЛЬНЫЕ МАШИНЫ И ЦЕПИ ЭЛЕКТРОВОЗОВ
Компрессоры и пневматическая цепь управления
Охлаждение машин и аппаратов
Приводы вспомогательных машин
Вспомогательные цепи и их электрические схемы
УПРАВЛЕНИЕ ЭЛЕКТРОВОЗАМИ И ЗАЩИТА ИХ В НЕНОРМАЛЬНЫХ РЕЖИМАХ
Непосредственное и косвенное управление. Контроллеры машиниста
Электрические блокировки
Схема цепи управления электровоза постоянного тока
Схема цепи управления электровоза переменного тока
Управление вспомогательными цепями
Управление электровозами по системе многих единиц
Защита оборудования от коротких замыканий и перегрузок
О других защитах
МЕХАНИЧЕСКАЯ ЧАСТЬ И РАСПОЛОЖЕНИЕ ОБОРУДОВАНИЯ
Осевые формулы электровозов
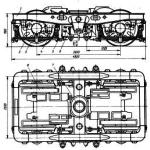
Рамы тележек
Кузова электровозов и их опоры
Рессорное подвешивание
Колесные пары, буксы и подшипники
Тяговые передачи и подвешивания тяговых двигателей
Расположение оборудования на электровозах
Электропоезда. Особенности их работы и конструкции
![]()