
НЕПОСРЕДСТВЕННОЕ И КОСВЕННОЕ УПРАВЛЕНИЕ. КОНТРОЛЛЕРЫ МАШИНИСТАМашинисту приходится управлять электровозом, на котором установлены тяговые двигатели суммарной мощностью несколько тысяч киловатт. Кроме того, на электровозе имеются различные вспомогательные машины, электрические аппараты, тормоза, которые также нужно приводить в действие или выводить из работы. Наряду с этим машинист обязан следить за показаниями путевых сигналов, состоянием пути, контактной сети, заботиться о том, чтобы не боксовали колесные пары, не происходило резких перепадов силы тяги. После пуска и разгона состава машинисту необходимо контролировать скорость движения и приводить ее в соответствие с разрешенной на данном участке. При системе непосредственного управления (рис. 81) электрические аппараты, включенные в силовую цепь, приводятся в действие непосредственно контроллером машиниста.
Рис.81. Система включения контроллера машиниста В простейшем случае контроллер имеет барабан из изоляционного материала. На барабане укреплены медные сегменты и неподвижные контактные пальцы, к которым подведены провода от разных участков схемы. В зависимости от положения (позиции) рукоятки контроллера и конфигурации сегментов барабана они замыкают те или иные контактные пальцы, которые включают или выключают секции пускового реостата и осуществляют другие переключения, изменяющие режим работы тяговых двигателей. Каждая позиция рукоятки контроллера фиксируется специальным механизмом. В системе косвенного управления (рис. 82) аппараты силовой цепи приводятся в действие электропневматическим, электромагнитным или электродвигательным приводом. Машинист, осуществляя переключения в цепи управления, включает или выключает эти приводы.
Рис. 82. Схема включения контроллера машиниста Как и в системе с непосредственным управлением, основным аппаратом цепи управления является контроллер машиниста. Однако здесь этот аппарат производит переключения не непосредственно в силовой цепи, работающей под высоким напряжением и с большими токовыми нагрузками, а в низковольтной цепи управления.
Рис. 83. Контроллер машиниста электровоза постоянного тока Контроллер машиниста, например, электровоза постоянного тока (рис. 83) имеет рукоятки — главную, реверсивную и для управления ослаблением возбуждения. На электровозах с электрическим торможением (рекуперативным) рукоятка ослабления возбуждения используется и как тормозная — для регулирования тока рекуперации. Кроме того, в этом случае добавляется еще одна рукоятка — реверсивно-селективная, необходимая для переключения двигателей, работающих в генераторном режиме, с одного вида соединения на другой. На современных электровозах устанавливают контроллеры кулачкового типа. Когда машинист переводит главную рукоятку контроллера с одной позиции на другую, поворачивается связанный с ней главный кулачковый вал. На вал насажен ряд фасонных дисков (кулачковых шайб) с впадинами и выступами (рис. 84).
Рис. 84. Главный кулачковый вал контроллера машиниста Против каждой шайбы на стойках укреплены подвижные и неподвижные контакты (контакторные элементы), к которым присоединены провода цепей управления.
Рис. 85 Схема контакторного элемента в разомкнутом (а) и замкнутом (б) положениях Если выступ диска касается ролика, то контакты разомкнуты (рис. 85, а). Как только впадина диска подойдет к ролику, он провалится в нее и под действием пружины контакты замкнутся (рис. 85, б). Это значит, что замкнется цепь, в которую включен контакторный элемент, и соответствующий аппарат сработает. Следовательно, очередность замыкания и размыкания проводов цепи управления и, как результат, очередность переключения аппаратов силовой цепи зависят от взаимного расположения впадин и выступов кулачковых шайб контроллера. В начало статьи |
Чертежи локомотивов и вагонов в КОМПАСе
ЭЛЕКТРОВОЗ: УСТРОЙСТВО И РАБОТА
Первое знакомство с электровозом
Переменный или постоянный ток
Электроснабжение железных дорог
Немного из теории движения поезда
История электрификации железных дорог
Понятия об электрических схемах
ТЯГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Какому двигателю отдать предпочтение?
Устройство тягового двигателя
Коммутация. Реакция якоря. Мощность
АППАРАТЫ СИЛОВОЙ ЦЕПИ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА
Токоприемники
Разъединители и быстродействующие выключатели
Пуск тяговых двигателей. Пусковые реостаты
Индивидуальные контакторы
Перегруппировка двигателей. Групповые переключатели
Режим ослабленного возбуждения. Индуктивные шунты
Реверсоры
Электрическое торможение
Принципиальные схемы силовых цепей
АППАРАТЫ И СИЛОВОЙ ЦЕПИ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА
Токоприемники. Главные выключатели
Тяговые трансфор-маторы.Регулирование напряжения
Главный контроллер
Полупроводниковые приборы и выпря-мительные установки
Преобразовательные установки для режима электрического торможения
Принципиальные схемы силовых цепей
ВСПОМОГАТЕЛЬНЫЕ МАШИНЫ И ЦЕПИ ЭЛЕКТРОВОЗОВ
Компрессоры и пневматическая цепь управления
Охлаждение машин и аппаратов
Приводы вспомогательных машин
Вспомогательные цепи и их электрические схемы
УПРАВЛЕНИЕ ЭЛЕКТРОВОЗАМИ И ЗАЩИТА ИХ В НЕНОРМАЛЬНЫХ РЕЖИМАХ
Непосредственное и косвенное управление. Контроллеры машиниста
Электрические блокировки
Схема цепи управления электровоза постоянного тока
Схема цепи управления электровоза переменного тока
Управление вспомогательными цепями
Управление электровозами по системе многих единиц
Защита оборудования от коротких замыканий и перегрузок
О других защитах
МЕХАНИЧЕСКАЯ ЧАСТЬ И РАСПОЛОЖЕНИЕ ОБОРУДОВАНИЯ
Осевые формулы электровозов
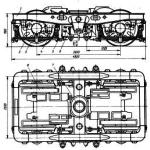
Рамы тележек
Кузова электровозов и их опоры
Рессорное подвешивание
Колесные пары, буксы и подшипники
Тяговые передачи и подвешивания тяговых двигателей
Расположение оборудования на электровозах
Электропоезда. Особенности их работы и конструкции
![]()